The project goals and objectives are
1.Communication privacy and security of multi-agent systems:
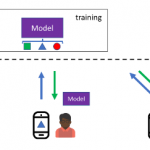
Develop a privacy-enhanced multi-agent system that uses shared knowledge for both (i) Vision and (ii) Communication tasks.
2.Ego-motion prediction under Intermittent Feedback:
This goal removes the assumption that the GPS signal is always given and considers a GPS denied area. We design a hybrid system to help a traditional error-based control method maintain an error bound, of its state information using a CNN-based localization method.